Google scholar for complete list
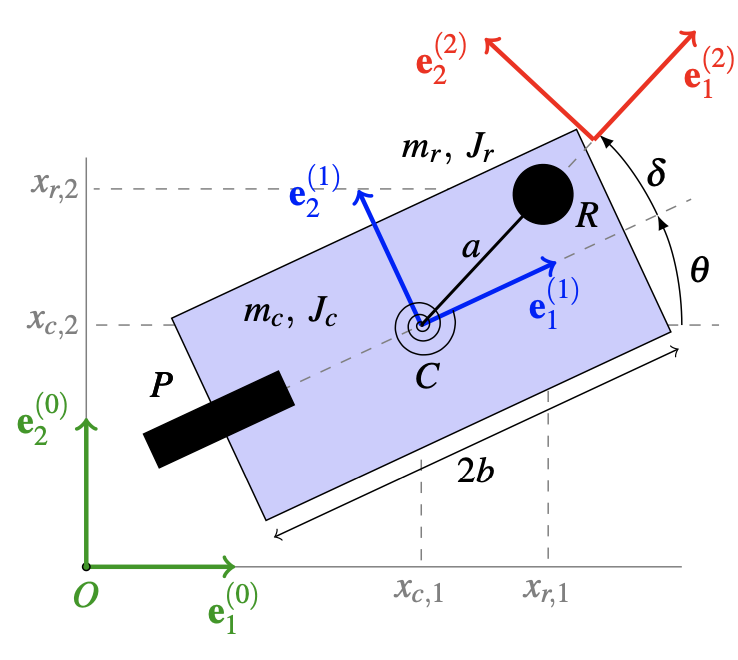
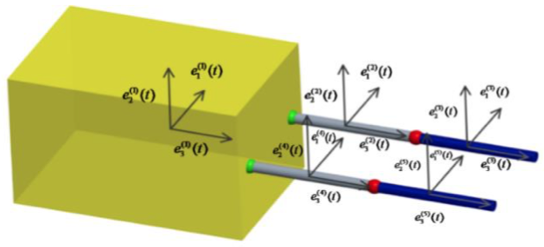
This paper presents a projection-based approach for deriving the equations of motion of connected rigid bodies based on the principle of least-constraint by Gauss.
This paper researches the motion of an ROV induced by the motion of the robotic manipulators, motor torques, and added mass of fluid.
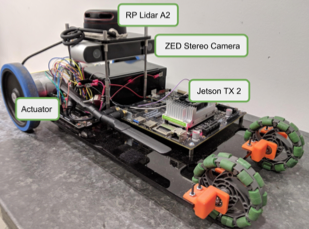
This paper presents a cost-friendly vehicle research platform and a robust implementation of SLAM.
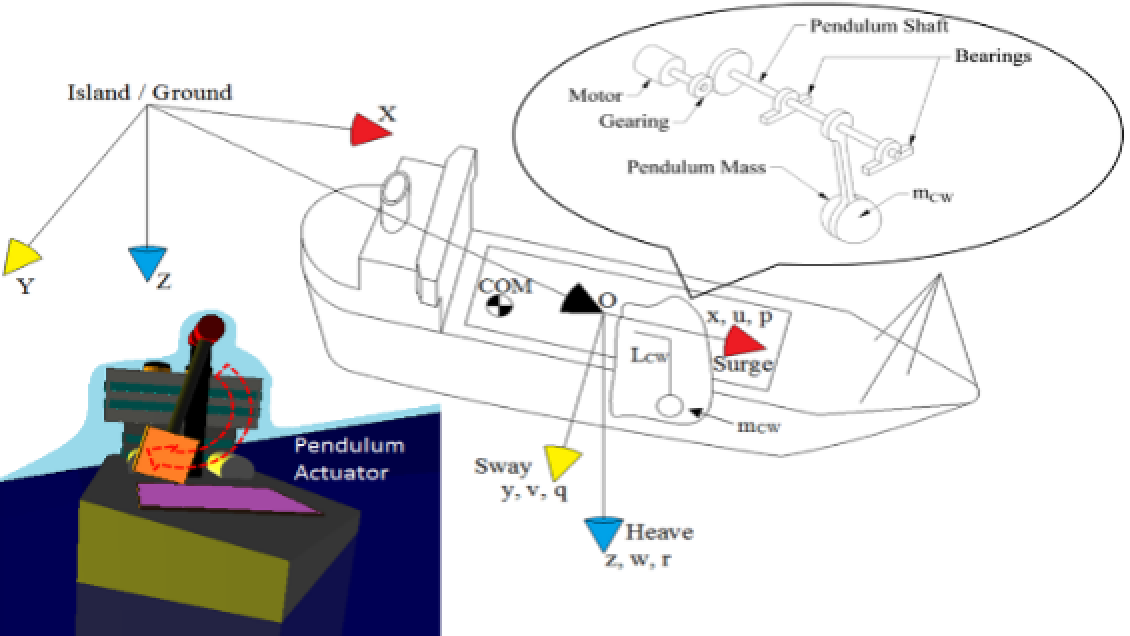
This paper shows how a ship with unstable roll can be stabilized with a pendulum.
This paper shows how compliant legs can be used attentuate airdrop landings of quadruped robots.